
Project Website: https://sites.google.com/stanford.edu/boat
Boss is a competitive watercraft and a wireless controller system that uses 4 main systems to complete in a robotics game played in a fountain:
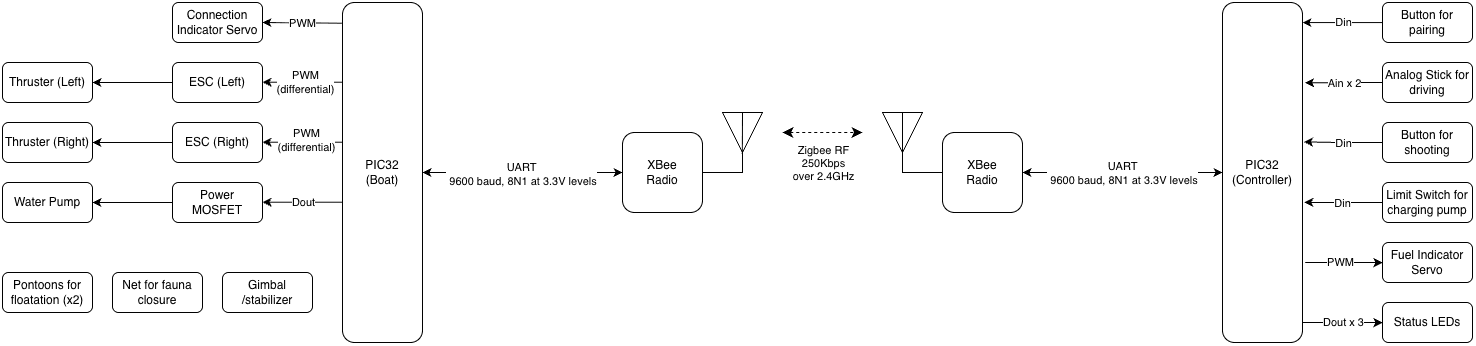
• Driving. Moves around the fountain using 2 APISQUEEN U1 12V~16V 200W Signal 3.4kg Thrust (1.7kg per unit) Brushless Underwater Thruster-Propellers
◦ We use differential drive using two tunnel jet motors, one under each catamaran pontoon.
• Intake. Collects the fauna passively into its container area below its deck. The gap between the two catamaran pontoons served as a passive holding bay. The area is wide between its two pontoons/halls, enclosed by a net to collect many fauna. Effective collection is enabled by its fine navigation capabilities, thanks to its balance, light weight, and well-placed thrust pivot. • Water-gun. Using a Delavan Powerflo 2200-201-SB 1.2GPM Demand Pump and a custom-designed nozzle for its water tube, Boss shoots jets of water to eliminate Captain Ducks of competing boats. • Gimbal/Stabilizer. Boss has a custom gimbal to stabilize the Captain Ducks over currents, impact, and acceleration. The stabilizer is passive, supported by adjustable-count steel counterweights.
Wireless Communication was enabled by XBee radio modules in API mode at 9600 baud, 5Hz message rate.