
Capacitive Touch Sensing
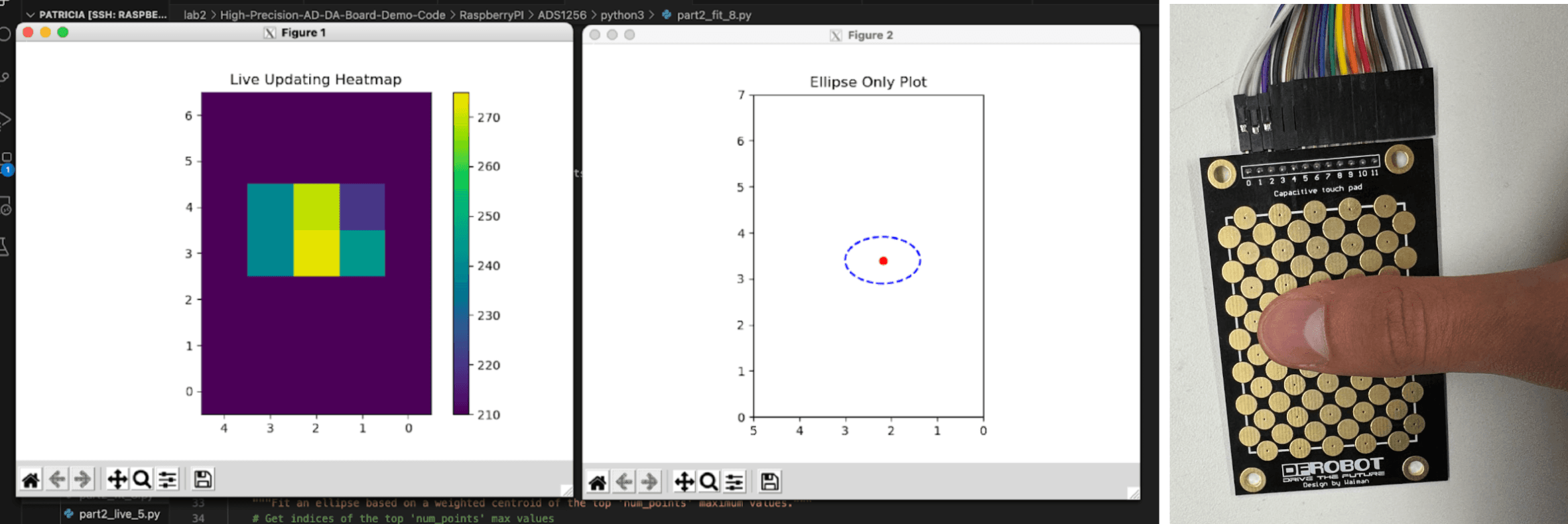
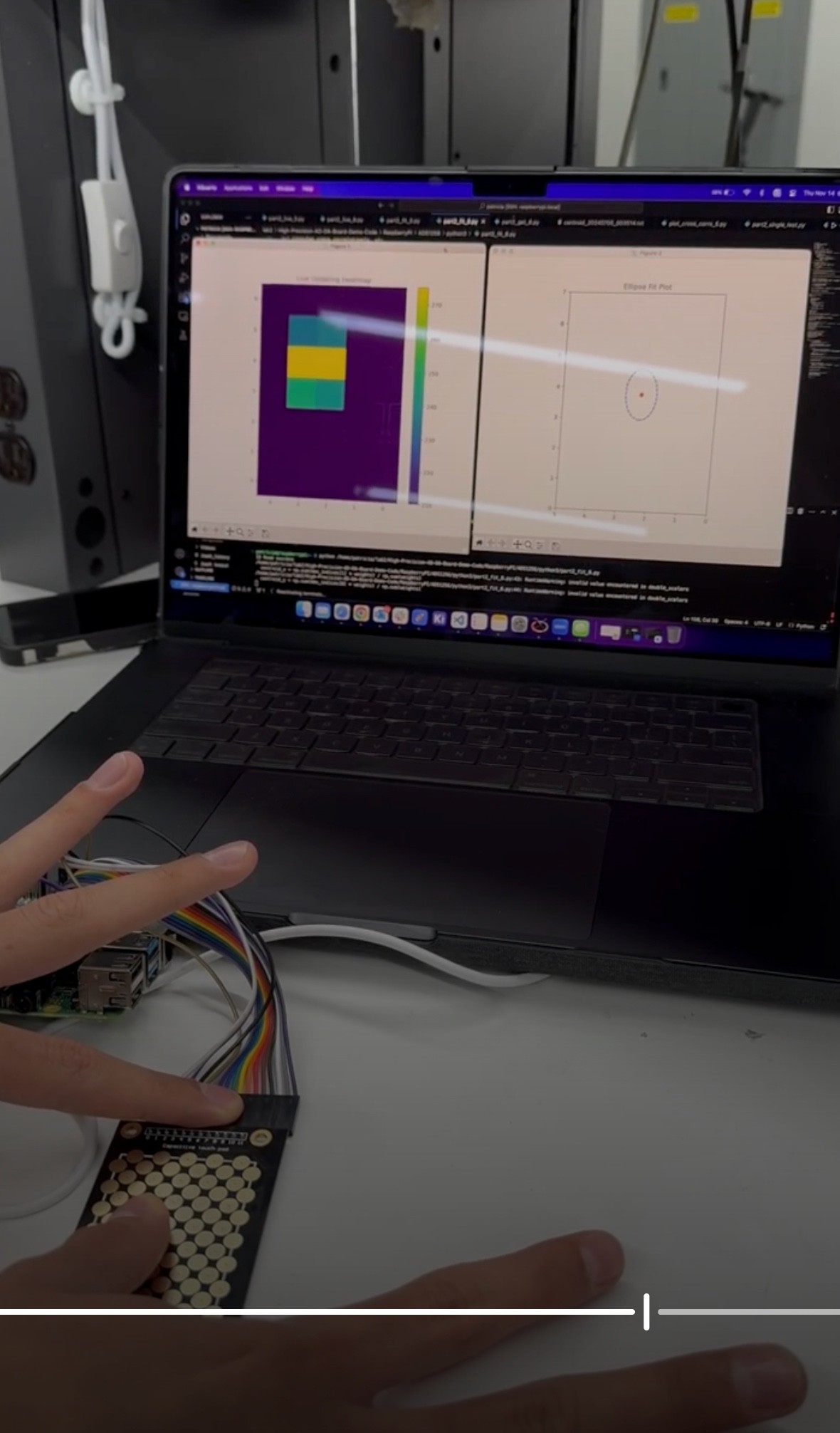
Using a capacitive touch sensor, we implemented PRBS drive and sense lines to track touch. Our code generated both a heatmap of the touch as well as a centroid estimate.
Description
Implements capacitive touch sensing using PRBS-driven lines and cross-correlationbased detection on sense lines.
Generates a real-time touch heatmap and calculates a centroid from sensor input.
Optimizes sampling and frame rate to balance responsiveness and precision (up to 6 fps).
Demonstrates trade-offs between short vs. long PRBS sequences for speed and accuracy.
Uses Kalman filtering to estimate touch location and velocity, enabling gesture tracking.
Touch data is visualized live, including ellipse fitting and heatmap overlays.
System built and tested with noise analysis, baseline correction, and bit-length tuning for robust detection.
Learning Outcomes
1. Technical Skills & Knowledge
Capacitive touch sensing principles and PRBS signal generation
Cross-correlation algorithms for localization
ADC configuration and sampling rate analysis
Real-time data plotting and signal noise handling
Application of 2D Kalman filters for motion estimation
Comparative evaluation of signal bit-lengths for design tuning
2. General Project/Practical Skills
Trade-off analysis: Accuracy vs. speed in sensing systems
Experimental design and controlled testing for performance evaluation
Interpreting and processing large sensor datasets
Clear documentation through visuals, live demos, and code organization
Documentation
Reach full documentation and demos here: https://docs.google.com/document/d/1w31i9TI1qzB_Jlte6xMf54AVjQe2aJYGS4aqW-wkKgk/edit?usp=sharing
All the code and demo videos are in: https://drive.google.com/drive/folders/1IhsBLmNXyd7g-sWnGCal_qK_OI29GPDY?usp=sharing
Using a capacitive touch sensor, we implemented PRBS drive and sense lines to track touch. Our code generated both a heatmap of the touch as well as a centroid estimate.
Implemented capacitive touch sensing using PRBS-driven lines, generating real-time touch heatmaps and centroid estimates. Key skills developed include cross-correlation algorithms, ADC configuration, and 2D Kalman filters for motion estimation. The project emphasizes trade-offs between accuracy and speed, with comprehensive documentation and demos available online.